
Esta entrevista surge a partir de un punto de encuentro entre nuestras investigaciones y la obra del artista cubano Rigoberto Díaz (1990). Los proyectos curatoriales que hemos venido desarrollando indagan en los procedimientos, tanto en el marco de la curaduría como en el de la creación artística. Los procedimientos creativos pueden encontrar base en distintos elementos ajenos a las artes, como fórmulas matemáticas, algoritmos o juegos de azar, por citar algunos ejemplos. En el caso de Rigoberto Díaz, su trabajo incorpora la Inteligencia Artificial (IA).
Graduado de la Academia Provincial de Artes Plásticas Raúl Corrales, en su ciudad natal Ciego de Ávila, y luego del Instituto Superior de Arte (ISA), en La Habana, la obra de Díaz “explora el espacio como plataforma simbólica para generar reflexiones y cuestionamientos en torno a la memoria. Al mismo tiempo, muestra un interés por el espacio como un sistema en el que constantemente se están produciendo formas de vida, conductas, informaciones.”
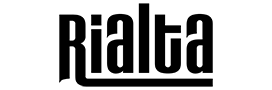
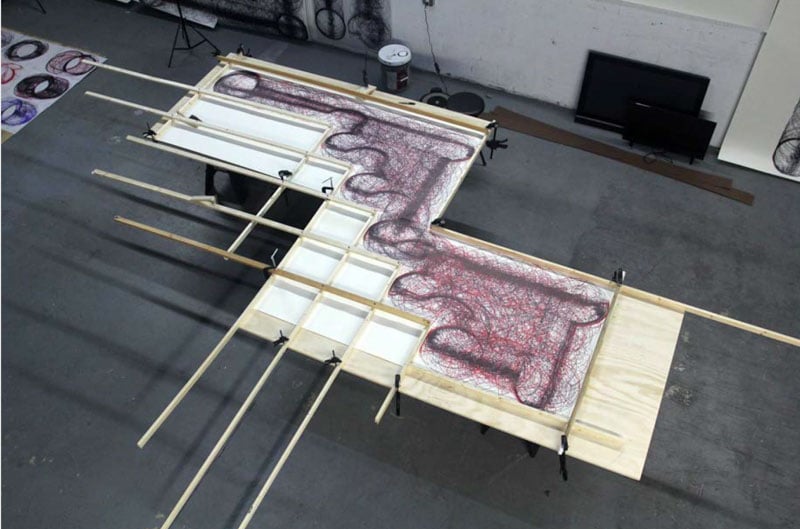
Antes y durante la pandemia de Covid-19, Rigoberto Díaz desarrolló Location Intelligence, un proyecto en colaboración con las aspiradoras Roomba, que trabajaban sin parar dentro de su casa, mientras él salía a trabajar. El artista decidió empapelar el suelo de su hogar, sobre el que trabajarían las Roomba. A estas máquinas incorporó rotuladores de diversos colores, cuya punta se mantenía en contacto con el piso. Una vez fuera de su casa, Díaz encendía las aspiradoras desde una aplicación en su celular. Los aparatos se movían por el espacio a partir de un sistema que traen incorporado, denominado Inteligencia de localizaciones (Location Intelligence).
En esta entrevista el artista reflexiona sobre este proyecto y el impacto de la tecnología y de la IA en el proceso creativo.

Tus proyectos guardan un legible correlato, es muy interesante como en la mayoría se trabaja la acumulación de información (en forma de aire, agua, polvo) en un espacio; y se repiten constantes como tiempo y espacio. ¿Notas algún cambio fundamental en esta zona de tu trabajo a partir de tu migración hacia Estados Unidos?
Migrar a los Estados Unidos influenció de forma muy importante mi trabajo, sobre todo en el aspecto conceptual. La dinámica de vida cambió por completo, por lo que las preocupaciones sobre los aspectos esenciales de la existencia y el arte se modificaron. El contexto es muy importante para comprender mis obras, al desarrollarme en un espacio diferente, las obras responden a los intereses de ese lugar, a la influencia que pueda ejercer en mi creatividad.
Tuve la tarea de decodificar mi contexto como un espacio creativo, de verlo desde la perspectiva de un creador. Nuevos materiales, nuevas influencias, todo un mundo de posibilidades para expresarme desde mis experiencias.

¿En qué circunstancias comienzas a desarrollar el proyecto Location Intelligence? ¿En alguna medida la crisis sanitaria del Covid-19 influyó en ello?
Empecé a trabajar en el proyecto Location Intelligence unos meses antes del Covid-19. Durante la crisis, realizaba otros trabajos fuera de casa no relacionados con el arte, por lo que fue muy interesante llevar ambas cosas. En el estudio realizaba estas obras a través de la app del móvil y las vigilaba por las cámaras de seguridad mientras salía a hacer otras actividades para ganar dinero. Fue muy interesante porque coexistían al mismo tiempo dos procesos de producción (el mío y el de las Roomba). El principio fue muy experimental, sobre todo para analizar el proceder de estos robots.
¿Vuelve a ser el espacio –entendido en su multiplicidad– el protagonista de este proyecto?
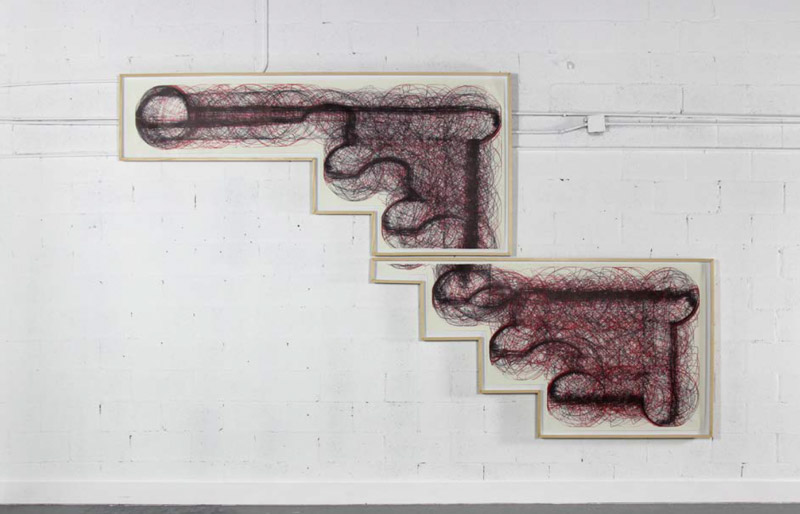
Como en todos mis proyectos, el espacio es un concepto fundamental para comprender y analizar las obras. En el caso de Location Intelligence, el espacio funciona como detonante. Me interesa mucho el mapa conceptual que crean estos robots a la hora de decodificar la zona de trabajo. En Location Intelligence, creo una memoria a partir de la experiencia recopilada por los robots. Las piezas creadas vienen a ser residuos del comportamiento de las máquinas, generado a partir de los análisis que llevan a cabo.
Logras crear un registro visual muy concreto a partir de un recorrido en principio invisible y azaroso, propulsado por la tecnología de la IA. ¿Se puede hablar de una creación a partir de dos “voluntades”, la del robot y la del artista? En tu trabajo ¿Cuál es el vínculo entre creatividad artística e IA?
La Inteligencia Artificial es una programación mediante algoritmos que se basan en la constante recopilación de datos para producir comportamientos.
Después de analizar y experimentar con las capacidades que tienen estos robots de analizar los espacios, quise crear un vínculo entre el azar y lo que podía ser predeterminado. Yo creaba ciertos espacios con ciertas reglas de juego según mi investigación y el robot debía de interpretar su contexto mediante el escaneo de la superficie. Una vez que terminaba, a veces simplemente perdía sus patrones de geolocalización, intentaba volver a la base, pero le era imposible porque volvía al mismo punto donde había empezado. Es un camino sin fin, una ida y vuelta, un constante análisis de la superficie. Ese modo de creación es para mí muy interesante, más allá de las formas logradas. Hay dos voluntades separadas en este proyecto, una es la que está detrás del funcionamiento del robot y otra la mía como artista e investigador de estos procesos programados.
¿En qué te basas para crear los recorridos de las Roomba? ¿Son esperables, desde tu punto de vista, los resultados obtenidos de los recorridos?
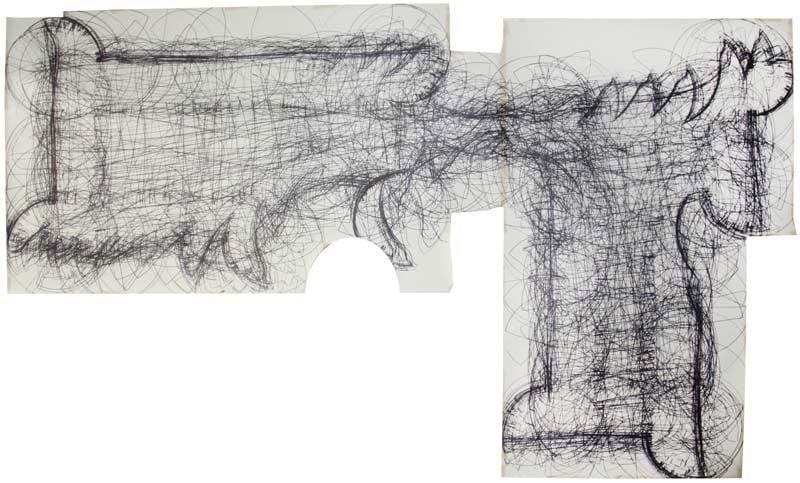
Me he basado en la propia arquitectura, en espacios urbanos, en jardines, en formas geométricas. Frente al círculo, por ejemplo, los robots perdían ciertas referencias espaciales, porque no tenían puntas para ubicarse. No tenían un principio, ni un final. Las formas dependían siempre del objetivo de cada experimento. Las dimensiones de los formatos variaban entre grandes, medianos y pequeños.
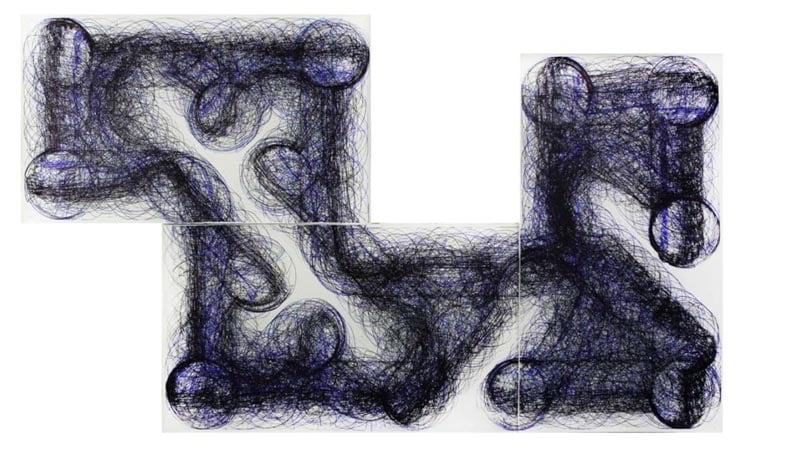
En Espacio Mínimo, les di la oportunidad a los robots de tener un campo de acción equivalente a sus dimensiones, solo tenían unas pulgadas para desplazarse. Cuando analizaba la forma en que estos robots resuelven problemas y evitan obstaculizaciones, comencé a observar patrones de comportamiento que se repetían en dependencia del entorno, y fue así como apareció una ventana para mí como artista. Comencé a manipular los espacios y a generar los resultados que esperaba. Así mismo pasa en la sociedad, cuando nuestros patrones de comportamiento nos permiten ser medibles, comparables y predecibles.
La visualidad de las obras de este proyecto es de naturaleza abstracta, ¿cómo te sientes utilizando este lenguaje en tu obra?
Mi objetivo no es crear formas abstractas, ni figurativas. Las formas son el resultado de todo el proceso, el residuo de las acciones mías y de las máquinas. Las formas abstractas de las piezas contienen todo un análisis algorítmico, un análisis de datos, formas conceptuales del medio, todo un cúmulo de información intrínseca que le da a la obra un enriquecimiento conceptual.
El marco es otro elemento fundamental en estas piezas. El marco viene a ser el límite, el camino que conduce a un espacio, abierto o cerrado, y es por eso que el montaje de las obras funge como algo fundamental, porque permite visualizar el proceso de trabajo a partir de la estructura creada.
Notamos una correlación entre la vigilancia ejercida desde el panóptico en tu obra Distopía y la vigilancia que ejerces sobre las Roomba a la distancia, no presencialmente, como en el primer caso, sino mediante cámaras de seguridad ¿Te merece esto alguna reflexión?
No lo había pensado de esa manera. En Distopía, analizaba la influencia de la arquitectura sobre comportamientos esperados del ser humano, y cómo este fenómeno se utilizaba para fines sociales y políticos. En el caso de Location Intelligence, la propia obra crea patrones para dirigir el comportamiento de los robots, una vez más asumo la posición del guardia para activar la obra.
En la obra Distopía (intervención en el presidio modelo, Isla de la Juventud, Cuba), asumo la posición del guardia dentro de la cárcel para tomar fotos a las 480 celdas que componían la circular.
En cuanto a Location Intelligence, ¿qué aspectos consideras que se vinculan con proyectos anteriores y cuáles se abren a nuevas investigaciones conceptuales y estéticas?
Location Intelligence es un paso más en mi investigación artística. Visualmente es muy diferente a obras anteriores, pero tiene un trasfondo conceptual consecuente con mi práctica artística: el análisis de los aspectos físicos del espacio transitable.
En un mundo donde cada día estamos más relacionados con la tecnología, donde dejamos de hacer cosas para dejarlas en manos de la Inteligencia Artificial, donde nos estamos acercando al metaverso, donde los NFTs son nuevas formas de hacer y vender arte y piezas de colección, estas cuestiones son las que rondan nuestro devenir como artistas de estos tiempos.
En Location Intelligence la importancia del espacio se visualiza principalmente en el recorrido de los robot-aspiradores, sin embargo, el polvo que estos recolectan también puede pensarse como un registro espaciotemporal. ¿Has reflexionado en torno al espacio que ocupa el polvo y los residuos que recolectan los robots? En ese sentido, este trabajo nos recuerda a tu obra Protocolo.
Por supuesto que lo he pensado y concuerdo perfectamente con la idea de que el polvo y los residuos registran un espacio temporal, sin embargo, en el proyecto Location Intelligence no lo utilicé como en otras obras que he realizado, en donde he recolectado residuos generados por mí en los últimos 5 años en los Estados Unidos. Estas otras piezas responden a un principio más de recolección de datos de mi espaciotemporal, polvos de trabajos, papeles de lijas, recibos de gasolina, tarjetas de tiempo de trabajo, filtros de los aires acondicionados de mi casa y otros sitios que frecuento.
Otra cosa muy interesante es que estos residuos me muestran el camino para próximos proyectos.

Como parte de tu trabajo con las tecnologías, ¿has pensado extender tus investigaciones y prácticas a espacios de la realidad virtual y las nuevas dinámicas del metaverso?
El metaverso es un mundo totalmente nuevo. Con la llegada de los NFTs y las criptomonedas se abre un abanico de posibilidades para los creadores. Estoy en fase de investigación de cómo funciona toda esta tecnología, porque tiene un potencial para la creación y para la vida cotidiana.
Quiero extender mis prácticas artísticas a estos nuevos medios, estoy empezando a crear mis primeros NFTs. Paulatinamente iré entendiendo cómo se mueven las dinámicas en este universo digital.
Como consecuencia de mi experimentación, quiero hacer varios ejercicios en el metaverso y con los NFTs. El proyecto Location Intelligence va a tener otra fase de creación a partir del metaverso como espacio expandido. Más que una muestra, es un ensayo de varios meses para la formación de varias obras. Quiero involucrar a personas de otros países a crear una dinámica de trabajo en la que la autoría se diluya, donde el público pueda diseñar nuevos escenarios, y yo sea un facilitador del proceso. Quiero crear dos exposiciones simultáneas, en la vida real y en el metaverso, pero que una influya en la otra y así recíprocamente. La participación del público es muy importante, sobre todo porque va a tener la posibilidad de participar activamente en la creación de este ensayo artístico.






Muchas felicidades!!! Excelente entrevista y muy interesante las obras. Felicidades Rigo!!!!